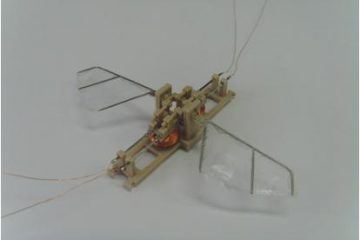
This work presents a design of a thermal SMA based simple small-sized and low-weight crawling robot, mimicking the crawling motion mechanism of Caenorhabditis elegans (C. elegans). Properties of the thermal SMA are similar to those of C. elegans muscle, which enables us to generate biologically relevant undulating motions. Each of 12 body segments composed of a pair of actuators is designed to be serially connected via a link that includes a motion control unit. Microcontroller is used to implement a simple sequential mode-based motion control scheme. Computer simulation and experimental results with a four segment prototype demonstrate the feasibility of the proposed robot design and control mechanism.
Related publications
1. H Yuk, D Kim, H Lee, S Jo, J Shin, Shape memory alloy-based small crawling robots inspired by C.elegans, Bioinspiration and Biomimetics, Sept. 2011.[LINK] [PDF]
2. H Yuk, J H Shin, S Jo, Crawling robot design mimicking C.elegans, International Conference on Ubiquitous Robots & Ambient Intelligence, 2010.[PDF]
3. H Yuk, J. H. Shin, S. Jo, Design and control of thermal SMA based small crawling robot mimicking C. elegans, IROS 2010. [LINK] [PDF]
4. H Yuk, J. H. Shin, S. Jo (2010) Design and control of thermal SMA based small crawling robot mimicking C. elegans, 대한기계학회 춘계학술대회, 포스터발표.