Biomedical Intelligence/AI for Healthcare
Sensory Intelligence
Soft Robotic Intelligence
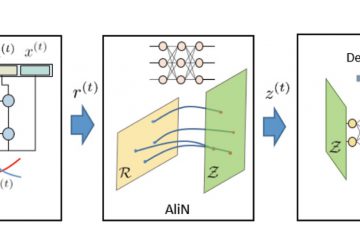
Vision-based Intention Detection for Hand Rehabilitation
For stroke survivors, diminished hand functions limit their ability to perform Activities of Daily Living (ADLs). To help stroke survivors perform rehabilitation exercises, soft robotic gloves have been utilized to assist them in actively practicing Read more…